Lego Technic JCB 5CX Wastemaster
JCB 5CX Wastemaster – Модель большого экскаватора-погрузчика JCB от Sariel. Особенности: 4 × 4 привод с 3 режимами рулевого управления, 6 дистанционно управляемых пневматических контуров, салон с салоном, внешний пневматический пульт, фонари и пользовательские наклейки.

Техническая спецификация:
- Дата: 02/12/2018
- Мощность: электрическая / пневматическая (функции питания)
- Пульт дистанционного управления: SBrick
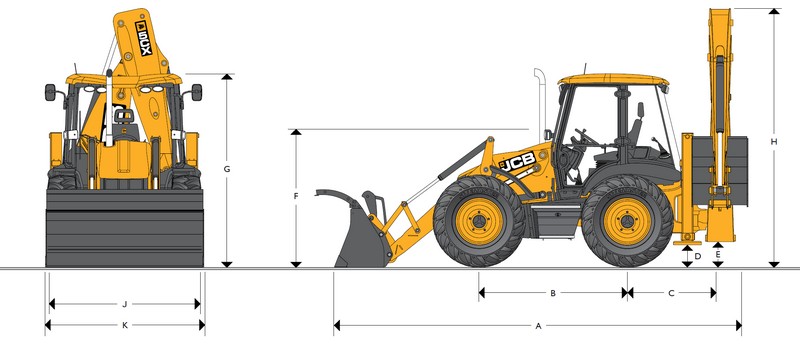
- Размеры: длина 75 штырей / ширина 24 шпильки / высота 31 шпильки
- Вес: 2.365 кг
- Подвеска: нет
- Привод: 1 x PF L с редуктором 7: 1
- Двигатели: 2 x PF Servo, 1 x PF L, 4 x PF M, 2 x Микромотор

Модель 1 год в разработке, с некоторыми спорными вариантами дизайна. У меня было два источника вдохновения для его создания: одна из них – удивительные модели Дженнифер Кларк , включая этот экскаватор, управляемый с помощью внешнего пневматического пульта . Я искал возможность контролировать сложную пневматическую модель таким образом, просто чтобы понять, что это такое. Другой источник был LEGO 42054 Claas Xerion набор, с шинами, которые выглядели почти так же, как шины на реальном JCB 5CX, за исключением того, что они были немного шире. Как только я масштабировал план Wastemaster на эти шины, я понял, что я не мог бы управлять всеми функциями, удаленными с моторами, не жертвуя салоном кабины, поэтому я решил управлять пневматикой с помощью пульта, подобного Jennifer’s, со встроенным компрессором и батареей , который сохранил много и много места внутри модели.

Другой выбор был главным образом техничным внешним видом. Я не поклонник моделей LEGO, которые выглядят наполовину техничными, полусистемами. Лично я предпочитаю, когда эти пропорции ближе к 90/10 в любом случае. Я решил, что с таким количеством функций, так много движущихся частей и так много пневматических шлангов я не могу покрыть большую часть внешнего вида JCB кусочками системы и сделать их хорошо выглядящими, поэтому я пошел в противоположном направлении, решив сделать это Посмотрите в основном Technic с несколькими системными битами.

Полученная модель была заполнена функциями до краев, и это было сражение за каждый миллиметр пространства внутри него, главным образом потому, что шасси было довольно узким, а колеса использовали большое количество пространства внутри, поворачиваясь. Практически все двигатели и электрические элементы касались друг друга, и на их месте было огромное количество пневматических шлангов и электрических проводов.

В центре шасси находились два сервомотора PF с одиночным PF L, застрявшим между ними, управляя всеми колесами. Не было подвески, так как я решил, что мой приоритет заключается в том, чтобы сохранить пространство для кабины, и реальный JCB в любом случае имеет подвеску на задней оси. Задний сервомотор PF был подключен через PF-переключатель, управляемый двигателем PF M с муфтой, позволяющий дистанционно поворачивать рулевое управление задней осью и, таким образом, переключаться между обычным рулевым управлением с четырьмя колесами и рулем краба. Кроме того, переключатель был подключен к рычагу внутри кабины, что позволяет вручную отключить его и, таким образом, включить только рулевое управление с передней осью. Другой двигатель PF M двигал рычаг экскаватора сзади назад из стороны в сторону, используя неуклюжую комбинацию большого линейного привода и цепи. Это было некрасиво, но это было единственное решение, которое входило в такое ограниченное пространство, и оно перемещало руку 8 штифтов от стороны к центру, что было меньше, чем реальный диапазон движения Wastemater. Я специально хотел использовать линейный привод вместо пневматики, чтобы удерживать рычаг экскаватора в правильном положении, и по той же причине я использовал другой двигатель PF M с червячным механизмом для управления ходом экскаваторного рычага. Траверс был возможен благодаря тому, что червячная шестерня скользнула по оси вместе с поворотным столом экскаваторного рычага, а рычаг мог поворачиваться на 90 градусов на одну сторону и примерно на 40 с другой (все пневматические шланги были слишком плотными, чтобы позволить ему вращаться дальше) , Я специально хотел использовать линейный привод вместо пневматики, чтобы удерживать рычаг экскаватора в правильном положении, и по той же причине я использовал другой двигатель PF M с червячным механизмом для управления ходом экскаваторного рычага. Траверс был возможен благодаря тому, что червячная шестерня скользнула по оси вместе с поворотным столом экскаваторного рычага, а рычаг мог поворачиваться на 90 градусов на одну сторону и примерно на 40 с другой (все пневматические шланги были слишком плотными, чтобы позволить ему вращаться дальше) , Я специально хотел использовать линейный привод вместо пневматики, чтобы удерживать рычаг экскаватора в правильном положении, и по той же причине я использовал другой двигатель PF M с червячным механизмом для управления ходом экскаваторного рычага. Траверс был возможен благодаря тому, что червячная шестерня скользнула по оси вместе с поворотным столом экскаваторного рычага, а рычаг мог поворачиваться на 90 градусов на одну сторону и примерно на 40 с другой (все пневматические шланги были слишком плотными, чтобы позволить ему вращаться дальше).

Стрела экскаватора была явно слишком широкой – изначально я использовал один пневматический цилиндр, чтобы поднять его, но к концу сборки цилиндр был недостаточен для полного веса, поэтому я добавил еще один. Два совмещенных цилиндра отлично входили в ровную, полностью вытянутую руку, от горизонтального до вертикального положения. Другой пневматический цилиндр, расположенный в той же секции руки, что и эти два, поднимал вторую секцию руки, а другой наклонял ведро (обратите внимание, что заднее ведро было желтым, в то время как реальный 5CX использовал черный цвет, потому что ведро, которое я хотел использовать, было только желтый). В средней части кронштейна экскаватора был также двигатель PF M, который дистанционно удалял его на 4 штыря – опять же, я решил использовать моторизованный небольшой линейный привод здесь, чтобы держать руку прочно расширенной во время рытья.

Передний загрузочный рычаг перемещался двумя группами из двух пневматических цилиндров каждый, один поднимал руку, а другой опрокидывал ведро. Я столкнулся с трудностями, сделав все это подходящим над большими передними колесами, к которым прикреплены передние брызговики, и вместе с ними направлялся вместе, поэтому, чтобы ведро опустилось до уровня земли, я в конечном итоге изменил установку ковша немного – это связано с рукой не около ее дна, а близко к ее вершине. Он по-прежнему работал правильно, но геометрия наклона немного отличалась от реальной экскаватора.

В то время как моторизованные функции модели работали дистанционно с использованием двух SBricks, все пневматические функции контролировались постоянно подключенным внешним пультом. Пульт дистанционного управления был подключен к модели с 12 шлангами, каждый длиной 60 см. Теоретически можно было отсоединить шланги от модели, поэтому ряд разъемов, висящих на шлангах, поддерживал их в соответствии с пневматическими портами модели, но на практике это означало потерю давления во всех пневматических системах, поэтому я не беспокоиться об этом. В пульте дистанционного управления размещался компрессор с тремя короткими пневматическими насосами V2, приводимыми в движение двумя двигателями PF XL (как оказалось, более слабые двигатели не могли работать с пневматической пневматикой), шестью пневматическими клапанами и батареей 8878 с переключателем, активированным подпружиненным триггером , Это позволило получить очень точный контроль, но не так полезен, как я надеялся, потому что пневматика в основном работала только при очень высоком давлении. Управление компрессором оказалось гораздо более важным для управления моделью, управляющей клапанами. Я также включил манометр LEGO для измерения давления воздуха на выходе компрессора. Пульт дистанционного управления мог быть значительно меньше, если новые пневматические клапаны избыли установлены 42080 LEGO , но они были слишком редки и слишком дороги в то время для меня, чтобы позволить покупать шесть. Также было возможно расширить шланги между моделью и пультом дистанционного управления, но это было дорого и, вероятно, ухудшило бы характеристики пневматической системы.

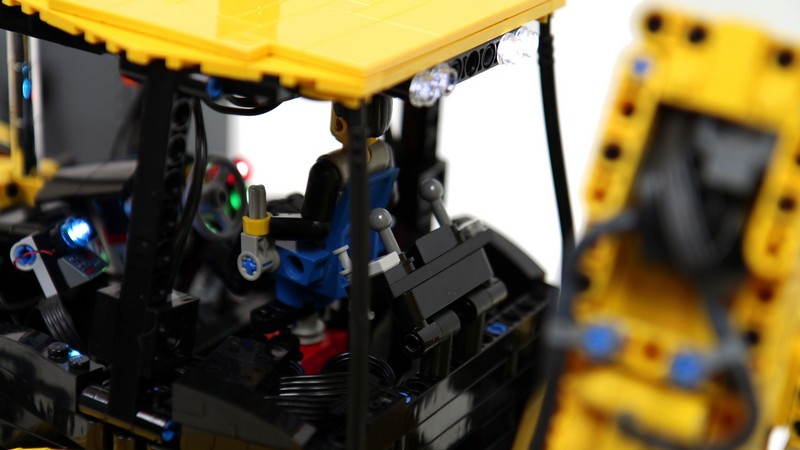
Наконец, в кабине, о которой я очень беспокоился, был размещен Technicfig на дистанционно повернутом сиденье с двумя приборными панелями и светодиодами и рулевым колесом на передней приборной панели. Светодиоды на панели и светодиодный маяк на крыше модели были продуктами Brickstuff , в то время как внешние огни кабины были обычными светодиодами LEGO.

Поскольку реальные экскаваторы-погрузчики JCB выглядят между желтым и оранжевым, а не желтым, я немного поиграл с цветом модели. Я считаю , что самый близкий LEGO цвет для машин JCB яркий светло – оранжевый, используется , например , в на 21303 наборе WALL • E , но это очень редкий цвет и не удалось построить всю модель использования. В конце концов, я решил просто сделать модель желтым и немного изменить цвет на фотографиях и видео, что, безусловно, не лучшее решение, но я предпочел его, например, нарисовать части LEGO.

Модель была очень сложной для создания, с множеством функций в очень ограниченном пространстве. Я не был полностью доволен этим, я думаю, что он был несколько перегружен функциями, в спине было некоторое изгиб, а пневматика работала медленно и с ограниченной точностью. Действительно, есть шарм для переключения пневматических клапанов пальцами, слушая, что воздух высвобождается из клапанов и наблюдает за тем, как манометр идет вверх и вниз, но на практике я не думаю, что это было заметно более точно, чем дистанционное управление клапанами, например, с помощью PF, и было совершенно непрактично иметь большой, громоздкий пульт, прикрепленный к модели в любое время. Фактически, чем дольше я играл с моделью, тем сильнее я желал линейных приводов, приводимых в движение сильным двигателем, обеспечивая мгновенное время отклика, без необходимости ждать повышения давления воздуха и без необходимости нуля клапана, чтобы остановить движение. Но я предполагаю, что это то, как работает пневматика LEGO, и вокруг нее нет никакого способа. При всей его сложности и переполнении функций, я думаю, что модель по крайней мере выглядела красивой и стройной. Это была моя первая модель, использующая внешний пневматический пульт, и, скорее всего, последний.